
ReverseKeyBorg - Turn your PiCy into a PiCy Type R
So you have RemoteKeyBorg, but you want to be able to have your PicoBorg based robot able to reverse?
Well the answer is to add some relays and get yourself ReverseKeyBorg.
ReverseKeyBorg is a replacement for the client half of RemoteKeyBorg, which is set up to drive two pairs of relays to give us both forward and reverse control on two wheels.
You will need to add a total of four single-pole double-throw relays (often called SPDT relays) to the circuit, one for each drive output.
We sell appropriate relays in pairs, remember to buy two pairs, not just one ;¬)
The new relays should be connected like so:
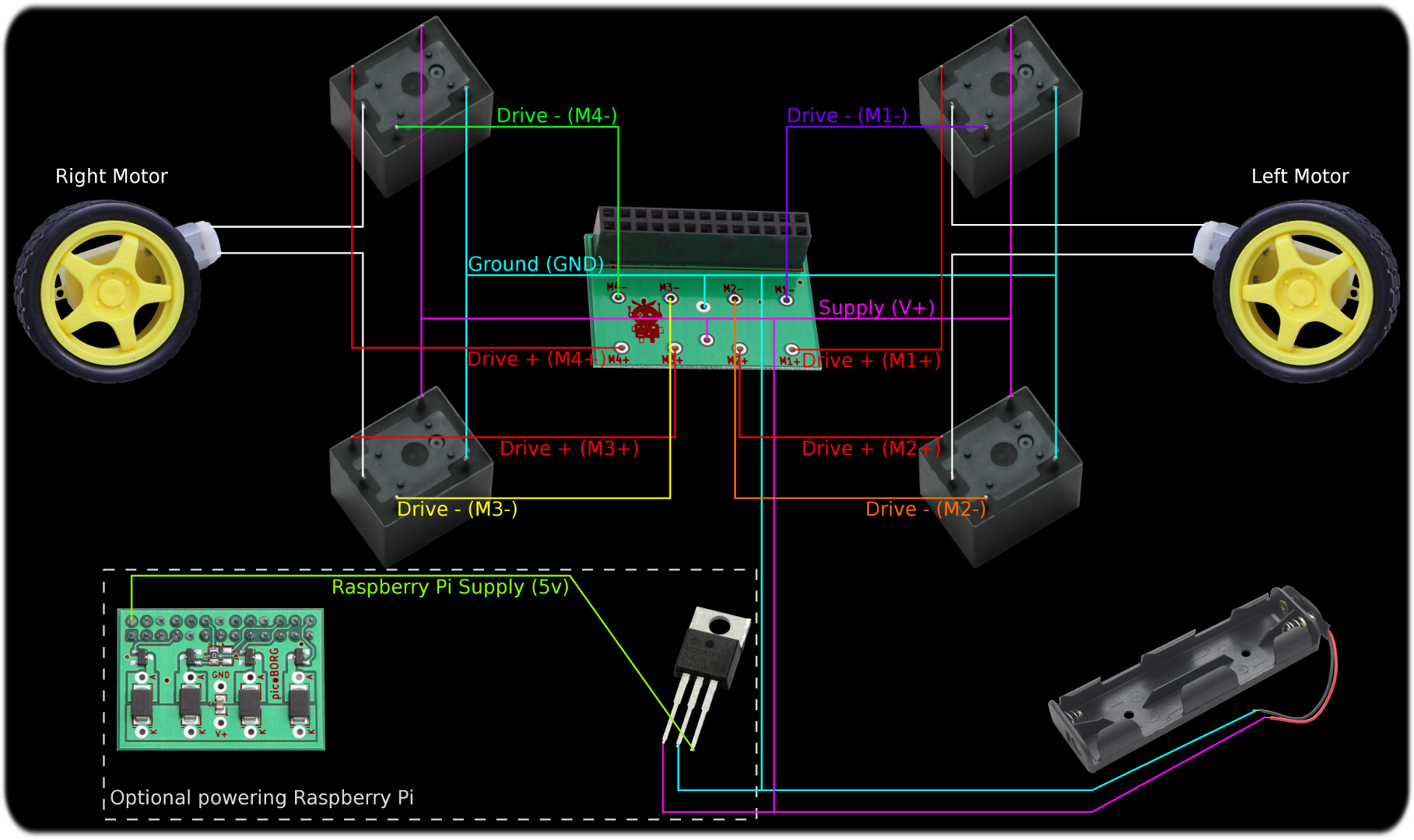
Click to enlarge
When done each motor should be connected to a pair of relays, and all four relays should be controlled from the PicoBorg.
Now your PiCy is a bona fide PiCy Type R :D
Since this script replaces the functionality of RemoteKeyBorgC.py, you will need to have RemoteKeyBorgS.py running on the Pi connected to your picoBorg.
Here's the code, you can download the RemoteKeyBorgS script file as text here.
Save the text file on your Raspberry Pi as RemoteKeyBorgS.py
Make the script executable using
and run on the Raspberry Pi with the PicoBorg using
Now we have sorted out the wiring, we need to download the script code:
Now we are all ready, run the script using:
on Linux or you favoured method under Windows.
The settings in ReverseKeyBorgC.py are similar to RemoteKeyBorgC.py, if the communications are not working you may need to change the network settings as outlined in RemoteKeyBorg, note that some of the line numbers will be close but different.
If motors are turning the wrong way, the following procedure should correct the problem:
If you have problems with the Raspberry Pi restarting when you try and move a motor, you may need to add resistors in series with the motors as shown in the main PiCy article.
You can download ReverseKeyBorgC.py as text here.
Well the answer is to add some relays and get yourself ReverseKeyBorg.
ReverseKeyBorg is a replacement for the client half of RemoteKeyBorg, which is set up to drive two pairs of relays to give us both forward and reverse control on two wheels.
Adding the relays to PiCy
You will need to add a total of four single-pole double-throw relays (often called SPDT relays) to the circuit, one for each drive output.
We sell appropriate relays in pairs, remember to buy two pairs, not just one ;¬)
The new relays should be connected like so:
When done each motor should be connected to a pair of relays, and all four relays should be controlled from the PicoBorg.
Now your PiCy is a bona fide PiCy Type R :D
Setting up the Raspberry Pi
Since this script replaces the functionality of RemoteKeyBorgC.py, you will need to have RemoteKeyBorgS.py running on the Pi connected to your picoBorg.
Here's the code, you can download the RemoteKeyBorgS script file as text here.
Save the text file on your Raspberry Pi as RemoteKeyBorgS.py
Make the script executable using
chmod +x RemoteKeyBorgS.pyand run on the Raspberry Pi with the PicoBorg using
sudo ./RemoteKeyBorgS.pyGet the script running
Now we have sorted out the wiring, we need to download the script code:
cd ~ wget -O ReverseKeyBorgC.py http://www.piborg.org/downloads/ReverseKeyBorgC.txt chmod +x ReverseKeyBorgC.pyAlternatively download the code here, and save the file as ReverseKeyBorgC.py, on Linux you will also need to make the script executable
Now we are all ready, run the script using:
~/ReverseKeyBorgC.pyon Linux or you favoured method under Windows.
Checking things are working
The settings in ReverseKeyBorgC.py are similar to RemoteKeyBorgC.py, if the communications are not working you may need to change the network settings as outlined in RemoteKeyBorg, note that some of the line numbers will be close but different.
If motors are turning the wrong way, the following procedure should correct the problem:
- Press and hold
UP:
- If the left wheel goes the wrong way, swap the drive numbers for
leftDrivePosandleftDriveNeg. - If the right wheel goes the wrong way, swap the drive numbers for
rightDrivePosandrightDriveNeg. - If you made any changes, re-run the script and try again, if problems persist swap
leftDrivePoswithrightDrivePosandleftDriveNegwithrightDriveNegand start from the top of this list again.
- If the left wheel goes the wrong way, swap the drive numbers for
- Press and hold
LEFT, if the left wheel is going forward (PiCy rotates to the right) swapleftDrivePoswithrightDrivePosandleftDriveNegwithrightDriveNegand start from the top of this list again.
If you have problems with the Raspberry Pi restarting when you try and move a motor, you may need to add resistors in series with the motors as shown in the main PiCy article.
The source
You can download ReverseKeyBorgC.py as text here.
#!/usr/bin/env python
# coding: Latin-1
# Load library functions we want
import socket
import time
import pygame
# Settings for the ReverseKeyBorg client
broadcastIP = '192.168.0.255' # IP address to send to, 255 in one or more positions is a broadcast / wild-card
broadcastPort = 9038 # What message number to send with (LEDB on an LCD)
leftDrivePos = 1 # Drive number for left motor positive relay
leftDriveNeg = 2 # Drive number for left motor negative relay
rightDrivePos = 3 # Drive number for right motor positive relay
rightDriveNeg = 4 # Drive number for right motor negative relay
interval = 0.1 # Time between keyboard updates in seconds, smaller responds faster but uses more processor time
regularUpdate = True # If True we send a command at a regular interval, if False we only send commands when keys are pressed or released
# Setup the connection for sending on
sender = socket.socket(socket.AF_INET, socket.SOCK_DGRAM, socket.IPPROTO_UDP) # Create the socket
sender.setsockopt(socket.SOL_SOCKET, socket.SO_BROADCAST, 1) # Enable broadcasting (sending to many IPs based on wild-cards)
sender.bind(('0.0.0.0', 0)) # Set the IP and port number to use locally, IP 0.0.0.0 means all connections and port 0 means assign a number for us (do not care)
# Setup pygame and key states
global hadEvent
global moveUp
global moveDown
global moveLeft
global moveRight
global moveQuit
hadEvent = True
moveUp = False
moveDown = False
moveLeft = False
moveRight = False
moveQuit = False
pygame.init()
screen = pygame.display.set_mode([300,300])
pygame.display.set_caption("RemoteKeyBorg - Press [ESC] to quit")
# Function to handle pygame events
def PygameHandler(events):
# Variables accessible outside this function
global hadEvent
global moveUp
global moveDown
global moveLeft
global moveRight
global moveQuit
# Handle each event individually
for event in events:
if event.type == pygame.QUIT:
# User exit
hadEvent = True
moveQuit = True
elif event.type == pygame.KEYDOWN:
# A key has been pressed, see if it is one we want
hadEvent = True
if event.key == pygame.K_UP:
moveUp = True
elif event.key == pygame.K_DOWN:
moveDown = True
elif event.key == pygame.K_LEFT:
moveLeft = True
elif event.key == pygame.K_RIGHT:
moveRight = True
elif event.key == pygame.K_ESCAPE:
moveQuit = True
elif event.type == pygame.KEYUP:
# A key has been released, see if it is one we want
hadEvent = True
if event.key == pygame.K_UP:
moveUp = False
elif event.key == pygame.K_DOWN:
moveDown = False
elif event.key == pygame.K_LEFT:
moveLeft = False
elif event.key == pygame.K_RIGHT:
moveRight = False
elif event.key == pygame.K_ESCAPE:
moveQuit = False
try:
print 'Press [ESC] to quit'
# Loop indefinitely
while True:
# Get the currently pressed keys on the keyboard
PygameHandler(pygame.event.get())
if hadEvent or regularUpdate:
# Keys have changed, generate the command list based on keys
hadEvent = False
driveCommands = ['X', 'X', 'X', 'X'] # Default to do not change
if moveQuit:
break
elif moveLeft:
# Left in reverse, right in forward
driveCommands[leftDrivePos - 1] = 'OFF'
driveCommands[leftDriveNeg - 1] = 'ON'
driveCommands[rightDrivePos - 1] = 'ON'
driveCommands[rightDriveNeg - 1] = 'OFF'
elif moveRight:
# Left in forward, right in reverse
driveCommands[leftDrivePos - 1] = 'ON'
driveCommands[leftDriveNeg - 1] = 'OFF'
driveCommands[rightDrivePos - 1] = 'OFF'
driveCommands[rightDriveNeg - 1] = 'ON'
elif moveUp:
# Both in forward
driveCommands[leftDrivePos - 1] = 'ON'
driveCommands[leftDriveNeg - 1] = 'OFF'
driveCommands[rightDrivePos - 1] = 'ON'
driveCommands[rightDriveNeg - 1] = 'OFF'
elif moveDown:
# Both in reverse
driveCommands[leftDrivePos - 1] = 'OFF'
driveCommands[leftDriveNeg - 1] = 'ON'
driveCommands[rightDrivePos - 1] = 'OFF'
driveCommands[rightDriveNeg - 1] = 'ON'
else:
# None of our expected keys, stop
driveCommands[leftDrivePos - 1] = 'OFF'
driveCommands[leftDriveNeg - 1] = 'OFF'
driveCommands[rightDrivePos - 1] = 'OFF'
driveCommands[rightDriveNeg - 1] = 'OFF'
# Send the drive commands
command = ''
for driveCommand in driveCommands:
command += driveCommand + ','
command = command[:-1] # Strip the trailing comma
sender.sendto(command, (broadcastIP, broadcastPort))
# Wait for the interval period
time.sleep(interval)
# Inform the server to stop
sender.sendto('ALLOFF', (broadcastIP, broadcastPort))
except KeyboardInterrupt:
# CTRL+C exit, inform the server to stop
sender.sendto('ALLOFF', (broadcastIP, broadcastPort))

