
PicoBorg Reverse - Advanced motor control for your Raspberry Pi
- Dual motor controller
- Power input Voltage 6-25V
- Power output Current Max 5A per channel 10A combined
- Emergency power off switch
- Speed Control and bidirectional
- Controls 2xDC motors or one stepper motor (4,5, or 6 wire)
- May be programmed with a PicKit2 for optional functionality
- Easily add additional PicoBorg Reverse PCBs to add more motors
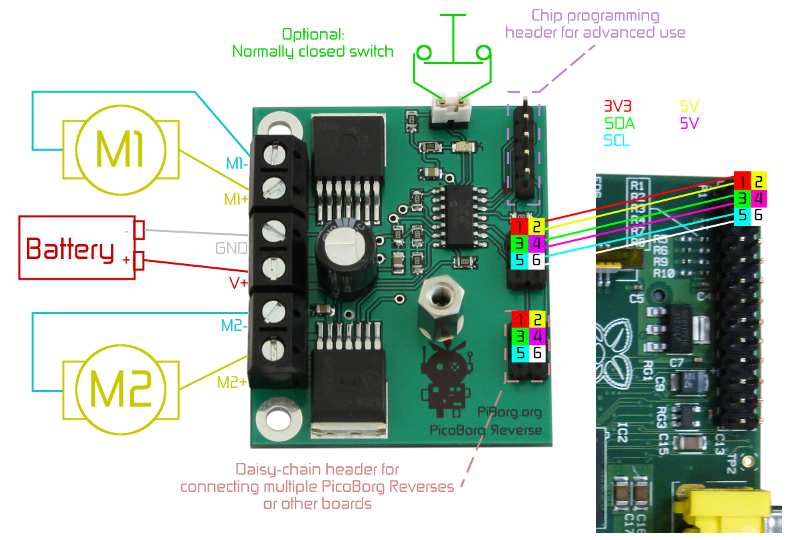
- Uses I2C SCK/SDA and 3.3V/GND pins for communications
Overheat protection, under voltage lockout, short circuit protection on outputs (to VCC and GND)
Optional PIC source code
If you wish to alter the code running on the PIC micro-controller, the original source can be downloaded here:http://www.piborg.org/downloads/picoborgrev/PicoBorgRev.X.zip
This will allow you to do things such as add end stop switches, use encoders and analogue feedback for closed loop control (eg. PID) etc. This code was built with MPLAB X v2.00 and the XC8 compiler at v1.30
The PIC can be programmed via the five pin header, pin 1 is marked with a triangle.
We recommend using a PICKit 2 for programming the board.


